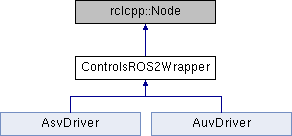
ROS2 node that wraps the Vehicle control stack and exposes its interface to the rest of the system. More...
#include <ControlsROS2Wrapper.h>
Public Types | |
| using | Locomotion = bb_controls_msgs::action::Locomotion |
| using | GoalHandleLocomotion = rclcpp_action::ServerGoalHandle< Locomotion > |
Public Member Functions | |
| ControlsROS2Wrapper (const std::string &name, std::unique_ptr< Vehicle > robot, std::string body_frame_tf_name="base_link", std::string world_frame_tf_name="map") | |
| Constructs the node, initialises all ROS interfaces, and loads parameters. More... | |
| ~ControlsROS2Wrapper () override | |
| ControlsROS2Wrapper (const ControlsROS2Wrapper &)=delete | |
| ControlsROS2Wrapper & | operator= (const ControlsROS2Wrapper &)=delete |
| ControlsROS2Wrapper (ControlsROS2Wrapper &&)=delete | |
| ControlsROS2Wrapper & | operator= (ControlsROS2Wrapper &&)=delete |
Protected Member Functions | |
| void | control_loop () |
| Executes one iteration of the 20 Hz control loop. More... | |
| void | publish_controller_status (const Vehicle::ControllerStatus &status) |
| Publishes a ControllerStatus message from the given status snapshot. More... | |
| void | debug_publish_loop () |
| Drains the debug queue and publishes all pending messages. More... | |
| void | refresh_params_if_changed () |
| Pulls the latest validated params from the ParamListener and applies them on change. More... | |
| void | apply_config_to_vehicle () |
| Applies config_ to the Vehicle's dynamics model, controller gains, and limits. More... | |
| void | sub_callback_world_position (const nav_msgs::msg::Odometry::ConstSharedPtr &m) |
| Odometry subscriber callback — updates vehicle state and starts the control loop. More... | |
| void | sub_callback_battery_voltage (const bb_sensor_msgs::msg::BatteriesWithId::ConstSharedPtr &msg) |
| Battery subscriber callback — forwards the minimum cell voltage to the Vehicle. More... | |
| void | sub_callback_teleop_force (const geometry_msgs::msg::Twist::ConstSharedPtr &msg) |
| Teleop subscriber callback — allocates the raw force directly if the controller is disabled. More... | |
| void | srv_callback_controller (const std::shared_ptr< bb_controls_msgs::srv::Controller::Request > req, std::shared_ptr< bb_controls_msgs::srv::Controller::Response > res) |
| Service callback to enable (stationkeep) or disable the controller. More... | |
| void | srv_callback_trajectory_xyz (const std::shared_ptr< bb_controls_msgs::srv::SplineTraj::Request > req, std::shared_ptr< bb_controls_msgs::srv::SplineTraj::Response > res) |
| Service callback to request a straight XYZ or multi-waypoint spline trajectory. More... | |
| void | srv_callback_encircle_traj (const std::shared_ptr< bb_controls_msgs::srv::EncircleTraj::Request > req, std::shared_ptr< bb_controls_msgs::srv::EncircleTraj::Response > res) |
| Service callback to request a circular arc (encircle) trajectory. More... | |
| rclcpp_action::GoalResponse | poly_handle_goal (const rclcpp_action::GoalUUID &uuid, std::shared_ptr< const Locomotion::Goal > goal) |
| Action server goal handler — rejects goals when the controller is disabled. More... | |
| rclcpp_action::CancelResponse | poly_handle_cancel (const std::shared_ptr< GoalHandleLocomotion > goal_handle) |
| Action server cancel handler — always accepts cancel requests. More... | |
| void | poly_handle_accepted (const std::shared_ptr< GoalHandleLocomotion > goal_handle) |
| Action server accepted handler — preempts any active goal and starts a new execute thread. More... | |
| void | poly_execute_action (const std::shared_ptr< GoalHandleLocomotion > goal_handle) |
| Executes a Locomotion action: plans trajectory, waits for completion, checks tolerances. More... | |
Protected Attributes | |
| std::once_flag | control_loop_started_ |
| Flag for starting control loop. More... | |
| const std::string | vehicle_frame_id_ |
| TF child_frame_id of the vehicle body frame. More... | |
| const std::string | world_frame_id_ |
| TF frame_id of the world frame. More... | |
| std::unique_ptr< Vehicle > | auv_ |
| Encapsulated vehicle control stack. More... | |
| rclcpp::Subscription< nav_msgs::msg::Odometry >::SharedPtr | world_sub_ |
| rclcpp::Subscription< bb_sensor_msgs::msg::BatteriesWithId >::SharedPtr | battery_sub_ |
| rclcpp::Subscription< geometry_msgs::msg::Twist >::SharedPtr | teleop_force_sub_ |
| rclcpp::Publisher< geometry_msgs::msg::WrenchStamped >::SharedPtr | pub_controller_force_ |
| rclcpp::Publisher< bb_controls_msgs::msg::ControllerStatus >::SharedPtr | pub_status_ |
| rclcpp::Publisher< geometry_msgs::msg::PoseArray >::SharedPtr | pub_traj_viz_ |
| rclcpp::Publisher< bb_controls_msgs::msg::Thrusters >::SharedPtr | pub_thruster_commands_ |
| rclcpp::Publisher< geometry_msgs::msg::WrenchStamped >::SharedPtr | pub_allocator_force_ |
| rclcpp::Publisher< bb_controls_msgs::msg::ThrusterForces >::SharedPtr | pub_thruster_forces_ |
| rclcpp::TimerBase::SharedPtr | control_loop_timer_ |
| rclcpp::TimerBase::SharedPtr | debug_publish_timer_ |
| moodycamel::ConcurrentQueue< DebugMessage > | debug_queue_ |
| Lock-free queue through which the control loop passes debug messages to the publish timer. More... | |
| rclcpp::Service< bb_controls_msgs::srv::Controller >::SharedPtr | controller_srv_ |
| rclcpp::Service< bb_controls_msgs::srv::SplineTraj >::SharedPtr | spline_traj_srv_ |
| rclcpp::Service< bb_controls_msgs::srv::EncircleTraj >::SharedPtr | encircle_traj_srv_ |
| rclcpp_action::Server< Locomotion >::SharedPtr | poly_action_server_ |
| std::mutex | action_goal_mutex_ |
| std::shared_ptr< GoalHandleLocomotion > | current_action_goal_ |
| std::atomic< bool > | shutdown_requested_ {false} |
| Signals the action execution thread to exit its loop. More... | |
| std::thread | action_execute_thread_ |
| Thread running action execute method; joined before destruction. More... | |
| std::shared_ptr< controls::ParamListener > | param_listener_ |
| Declares all parameters, validates updates, and exposes the generated Params struct. More... | |
| controls::Params | config_ |
| Local snapshot of ROS parameters, pushed to Vehicle subsystems on change. More... | |
| double | prev_time_ = 0.0 |
| ROS timestamp of the previous control loop iteration. More... | |
| Array6d | twist_lpf_tau_ = Array6d::Zero() |
| Per-axis twist low-pass time constants (s); 0 disables an axis. More... | |
| Vector6d | twist_lpf_state_ = Vector6d::Zero() |
| State of the per-axis first-order low-pass filter on the measured twist. More... | |
| bool | twist_lpf_init_ = false |
| Whether twist_lpf_state_ holds a valid sample. More... | |
| rclcpp::CallbackGroup::SharedPtr | odom_cb_group_ |
| rclcpp::CallbackGroup::SharedPtr | control_loop_cb_group_ |
| rclcpp::CallbackGroup::SharedPtr | services_cb_group_ |
| rclcpp::CallbackGroup::SharedPtr | actions_cb_group_ |
| rclcpp::CallbackGroup::SharedPtr | aux_cb_group_ |
Static Protected Attributes | |
| static constexpr int | CONTROL_LOOP_RATE = 20 |
| Control loop frequency in Hz. More... | |
| static constexpr double | MIN_DEPTH_CLAMP = 0.00 |
| Minimum depth value clamp to avoid near-zero depth noise (m) More... | |
| static constexpr double | MAX_VEL = 1.0 |
| Max plausible vehicle speed for odometry jump rejection (m/s) More... | |
| static constexpr double | TWIST_LPF_RESET_DT = 0.5 |
| Odometry gap (s) beyond which the twist low-pass filter re-initialises. More... | |
Detailed Description
ROS2 node that wraps the Vehicle control stack and exposes its interface to the rest of the system.
Manages all ROS publishers, subscribers, services, and actions. Runs the 20 Hz control loop (started on receipt of the first odometry message), drains a lock-free debug queue at 20 Hz on a separate timer, and forwards parameter updates to the Vehicle and SystemDynamicsBase objects at runtime.
Services:
- in/controller — Enable (stationkeep) or disable the controller
- in/xyzTraj — Request a waypoint/spline trajectory
- in/encircleTraj — Request a circular arc trajectory
Actions:
- in/locomotion/poly — Execute a waypoint trajectory with tolerance-based success checking
Subscriptions:
- in/odom_ned — Vehicle odometry (nav_msgs/Odometry)
- in/batteries — Battery voltages
- in/teleop — Direct force commands (disables the controller if running, then allocates directly)
Publications:
- out/force — Controller body force (WrenchStamped)
- out/force/allocated — Achieved body force after allocation (WrenchStamped)
- out/trajectory/status — Trajectory and controller status
- out/trajectory/viz — Sampled trajectory poses for RViz
- out/thrusters/input — Per-thruster PWM commands
- out/thrusters/forces — Per-thruster forces in Newtons
Member Typedef Documentation
◆ GoalHandleLocomotion
| using ControlsROS2Wrapper::GoalHandleLocomotion = rclcpp_action::ServerGoalHandle<Locomotion> |
◆ Locomotion
| using ControlsROS2Wrapper::Locomotion = bb_controls_msgs::action::Locomotion |
Constructor & Destructor Documentation
◆ ControlsROS2Wrapper() [1/3]
|
explicit |
Constructs the node, initialises all ROS interfaces, and loads parameters.
- Parameters
-
name [in] ROS node name robot [in] Fully constructed Vehicle instance body_frame_tf_name [in] TF frame ID of the vehicle body frame world_frame_tf_name [in] TF frame ID of the world frame
◆ ~ControlsROS2Wrapper()
|
override |
◆ ControlsROS2Wrapper() [2/3]
|
delete |
◆ ControlsROS2Wrapper() [3/3]
|
delete |
Member Function Documentation
◆ apply_config_to_vehicle()
|
protected |
Applies config_ to the Vehicle's dynamics model, controller gains, and limits.
◆ control_loop()
|
protected |
Executes one iteration of the 20 Hz control loop.
Calls process_pending, get_force, allocate_force, and publishes thruster commands. Enqueues debug data for the background publish timer.
◆ debug_publish_loop()
|
protected |
Drains the debug queue and publishes all pending messages.
Also publishes the current controller status. Called at 20 Hz by a separate timer on the aux callback group.
◆ operator=() [1/2]
|
delete |
◆ operator=() [2/2]
|
delete |
◆ poly_execute_action()
|
protected |
Executes a Locomotion action: plans trajectory, waits for completion, checks tolerances.
Runs in action_execute_thread_. Publishes periodic feedback and resolves the action result to SUCCESS when pose errors fall within the goal tolerances, or to ABORTED/FAILURE on preemption or planning errors.
- Parameters
-
goal_handle [in] Handle used to publish feedback and set the final result
◆ poly_handle_accepted()
|
protected |
Action server accepted handler — preempts any active goal and starts a new execute thread.
- Parameters
-
goal_handle [in] Handle to the newly accepted goal
◆ poly_handle_cancel()
|
protected |
Action server cancel handler — always accepts cancel requests.
- Parameters
-
goal_handle [in] Handle to the goal being cancelled
- Returns
- CancelResponse::ACCEPT
◆ poly_handle_goal()
|
protected |
Action server goal handler — rejects goals when the controller is disabled.
- Parameters
-
uuid [in] Goal UUID assigned by the action client goal [in] Locomotion goal
- Returns
- ACCEPT_AND_EXECUTE if the controller is enabled; REJECT otherwise
◆ publish_controller_status()
|
protected |
Publishes a ControllerStatus message from the given status snapshot.
- Parameters
-
status [in] Controller status snapshot to publish
◆ refresh_params_if_changed()
|
protected |
Pulls the latest validated params from the ParamListener and applies them on change.
◆ srv_callback_controller()
|
protected |
Service callback to enable (stationkeep) or disable the controller.
- Parameters
-
req [in] Request with an enable flag res [out] Response with a status flag (always true)
◆ srv_callback_encircle_traj()
|
protected |
Service callback to request a circular arc (encircle) trajectory.
- Parameters
-
req [in] EncircleTraj request containing radius, turn angle, and spiral parameters res [out] Response populated with the assigned trajectory UUID, or empty on failure
◆ srv_callback_trajectory_xyz()
|
protected |
Service callback to request a straight XYZ or multi-waypoint spline trajectory.
- Parameters
-
req [in] SplineTraj request containing waypoints and relative-coordinate flags res [out] Response populated with the assigned trajectory UUID, or empty on failure
◆ sub_callback_battery_voltage()
|
protected |
Battery subscriber callback — forwards the minimum cell voltage to the Vehicle.
- Parameters
-
msg [in] Incoming battery message containing per-cell voltages
◆ sub_callback_teleop_force()
|
protected |
Teleop subscriber callback — allocates the raw force directly if the controller is disabled.
If the controller is not disabled, issues a disable request and ignores the message.
- Parameters
-
msg [in] Twist message interpreted as a 6DOF body force [Fx, Fy, Fz, Tx, Ty, Tz]
◆ sub_callback_world_position()
|
protected |
Odometry subscriber callback — updates vehicle state and starts the control loop.
- Parameters
-
m [in] Incoming odometry message
Member Data Documentation
◆ action_execute_thread_
|
protected |
Thread running action execute method; joined before destruction.
◆ action_goal_mutex_
|
protected |
◆ actions_cb_group_
|
protected |
◆ auv_
|
protected |
Encapsulated vehicle control stack.
◆ aux_cb_group_
|
protected |
◆ battery_sub_
|
protected |
◆ config_
|
protected |
Local snapshot of ROS parameters, pushed to Vehicle subsystems on change.
◆ control_loop_cb_group_
|
protected |
◆ CONTROL_LOOP_RATE
|
staticconstexprprotected |
Control loop frequency in Hz.
◆ control_loop_started_
|
protected |
Flag for starting control loop.
◆ control_loop_timer_
|
protected |
◆ controller_srv_
|
protected |
◆ current_action_goal_
|
protected |
◆ debug_publish_timer_
|
protected |
◆ debug_queue_
|
protected |
Lock-free queue through which the control loop passes debug messages to the publish timer.
◆ encircle_traj_srv_
|
protected |
◆ MAX_VEL
|
staticconstexprprotected |
Max plausible vehicle speed for odometry jump rejection (m/s)
◆ MIN_DEPTH_CLAMP
|
staticconstexprprotected |
Minimum depth value clamp to avoid near-zero depth noise (m)
◆ odom_cb_group_
|
protected |
◆ param_listener_
|
protected |
Declares all parameters, validates updates, and exposes the generated Params struct.
◆ poly_action_server_
|
protected |
◆ prev_time_
|
protected |
ROS timestamp of the previous control loop iteration.
◆ pub_allocator_force_
|
protected |
◆ pub_controller_force_
|
protected |
◆ pub_status_
|
protected |
◆ pub_thruster_commands_
|
protected |
◆ pub_thruster_forces_
|
protected |
◆ pub_traj_viz_
|
protected |
◆ services_cb_group_
|
protected |
◆ shutdown_requested_
|
protected |
Signals the action execution thread to exit its loop.
◆ spline_traj_srv_
|
protected |
◆ teleop_force_sub_
|
protected |
◆ twist_lpf_init_
|
protected |
Whether twist_lpf_state_ holds a valid sample.
◆ TWIST_LPF_RESET_DT
|
staticconstexprprotected |
Odometry gap (s) beyond which the twist low-pass filter re-initialises.
◆ twist_lpf_state_
|
protected |
State of the per-axis first-order low-pass filter on the measured twist.
◆ twist_lpf_tau_
|
protected |
Per-axis twist low-pass time constants (s); 0 disables an axis.
◆ vehicle_frame_id_
|
protected |
TF child_frame_id of the vehicle body frame.
◆ world_frame_id_
|
protected |
TF frame_id of the world frame.
◆ world_sub_
|
protected |
The documentation for this class was generated from the following files:
- include/nodes/ControlsROS2Wrapper.h
- src/nodes/ControlsROS2Wrapper.cpp